oiya gw mau ngasih rangkaian LINE FOLLWER(tetteretteret)
{kind=link}
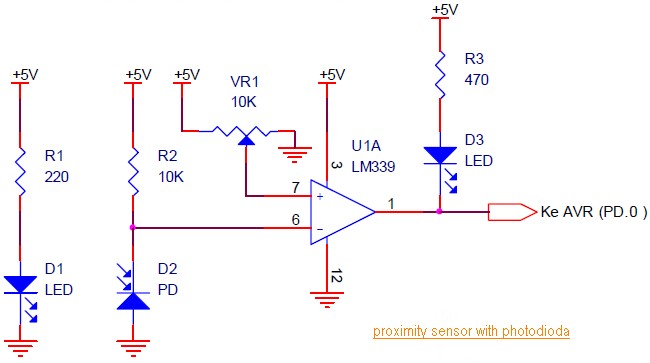
ini nama nya sensor (yaiyalah yang bilang sandal sape bang)
{kind=link}
kalau kalian inget waktu pelajaran OP-AMP (kecuali yang sering cabut karena guru nya killer) ini lah kegunaan dari komperator.
komperator memiliki tugas: membuat sinyal digital.dengan perhitungan
jika kaki 7(+)>kaki 6(-)
maka output nya akan berlogika 1
jika kaki 7(+)<kaki 6(-) maka output nya akan berlogika 0
berhubung kita menggunakan sistem micro kontroler maka kita akan menggunakan logika 0 seperti jika ada yes no question .maka yes=0 no=1 (ceile bisa bahasa inggris gw)
.misal nya kita ingin membuat robot itu maju maka kita perlu inputan dari sensor 0.itu juga belum pasti.karena jika kita menggunakan microkontroler maka kita bisa merubah semua nya seperti yang kita ingin kan
- saluran I/O sebanya 32 yaitu port A sampai port D
- ADC(analog to digital converter)10 bit sebanyak 8 chanel
- memiliki 3 bua timer counter nya dapat sebagai perbandingan
- CPU yang memiliki 32 register (mantap kan)
- 131 instruksi handal yang umumnya hanya membutuh kan 1 siklus clock
- watchdog timer dengan osilator internal
- 2 buah timer/counter 8 bit
- 1 buah timer?counter 16 bit
- tegangan operasi 2.7-5.5 volt
- internal sram 1KB
- memory flash sebesar 16 KB dengan kemampuan read while write
- unti interupsi internal eksternal
- port antar muka spi
- EEPROM sebesar 512 byte yang dapat di program saat operasi
- antar muka komparataor analog
- 4 chanel PWM
- 32X8 general purpose register
- kecepatan mencapai 16 MIPS PADA KRISTAL 16MHZ
- port USART PROGRAMMABLE untuk komunikasi serial
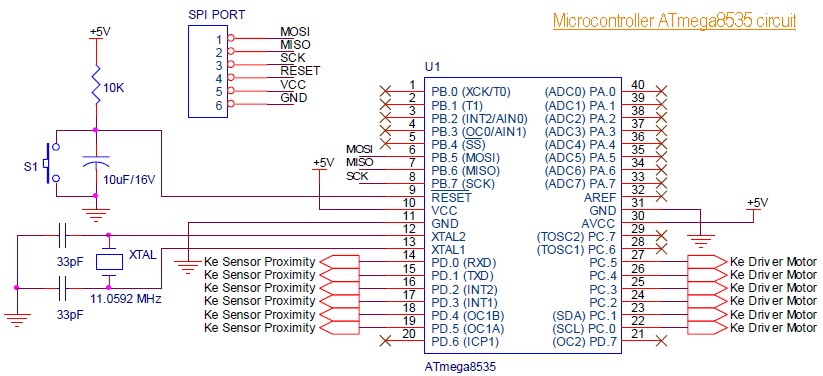
- vcc merupakan catu daya untuk rangkaian ini biasa nya 5volt.oleh karena itu biasa nya ada IC regulator 7805 untuk penyetabilan daya nya
- GND sebagai pin ground (0)
- port A (PA0...PA7)merupakan pin I/O dua arah dan dapat di program sebagai pin ADC
- port B (PB0....PB7)merupakan pin I/O dua arah dan pin fungsi khusus yaitu Timer/counter.komparator analog.dan SPI
- port C(PC0...PC7)merupakan pin I/O dua arah dan pin ini berfungsi TWI.komparator analog.dan timer osilator
- port D(PD)...PD7)merupakan pin I/O dua arah dan pin ini berfungsi komperator analog interupsi eksternal.dan komusnikasi serial
- reset berfungsi untuk me reset skerja micro kontroler
- XTAL1 dan XTAL 2 merupakan clock eksternal.suatu micro kontroler membutuh kan detak (clock)agar dapat mengeksekusi(menjalankan) intruksi yang ada di memory.semakin besar nilai XTAL maka semakin cepat kerja micro kontroler
- AVCC sebagai pin masukan tegangan ADC
- AREF senagai masukan tegangan refensi.
sensor nya yang warna iem kalau gak salah.contoh di bawah gak pakek CPU ATMEGA
yang akan kita sambung ke CPU(ATMEGA 8535 maunpun ATMEGA16 BIT)nah setelah terbentuk seperti bentuk di atas maka (yang CPU ATMGEGA 8535 BUKAN YANG CONTOH SENSOR)
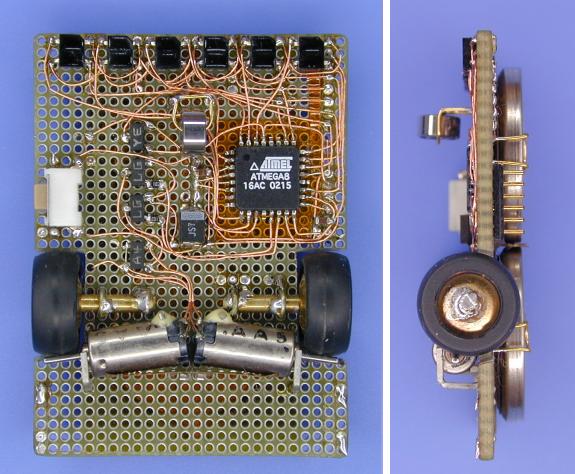
kita akan menggunakan motor driver untuk menjalankan sebuah dinamo atau motor DC
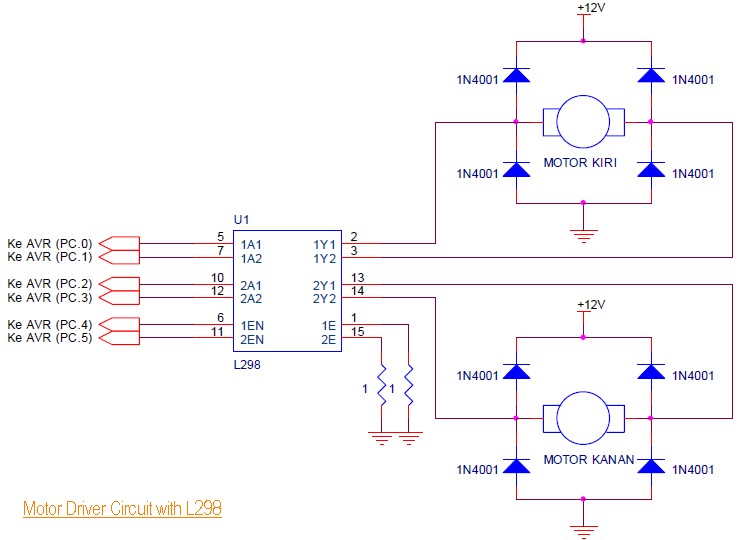
nah setelah di rangakai steperti diatas maka kita perlu mengisi program kedalam CPU
nah ini lah masalah nya gw gak bisa ngasih contoh program nya karena aplikasi gak bisa ke instal di komputer gw.yah sampai sini dulu deh.ntar gw cari lagi lewat laptop yang windows 7 32 bit.kalau ada perkembangan langsung post in deh.
No comments:
Post a Comment